1. 프로젝트 개요
- 주제: 자율주행 자동차 제어 프로젝트를 통한 일머리 역량 강화
- 장비: 아두이노 메가, 자율주행 키트, 각종 센서(초음파, 적외선, IR) 및 모터류
- 핵심 목표: 3대 핵심 기능(장애물 회피, 라인 트레이싱, 리모컨 제어)의 성공적 구현 및 주행 안정성 확보


2. 주요 구현 기능
- 장애물 회피: 초음파 센서와 서보 모터를 결합하여 전방 180도 측정 후 경로 결정
- 라인 트레이싱: 적외선 센서로 바닥 라인을 감지하여 정해진 경로를 따라 주행
- 리모컨 제어: IR 센서를 이용해 차량 이동 및 투석기 적재/발사 기능 제어

3. PDCA 기반 품질 향상 및 문제 해결
단순 구현을 넘어 PDCA(Plan-Do-Check-Act) 사이클을 적용하여 시스템의 완성도를 높임.
- [CHECK] 문제점 발견: 초기 테스트 시 회전 각도 불일치로 인한 장애물 충돌 발생 (성공률 20%)
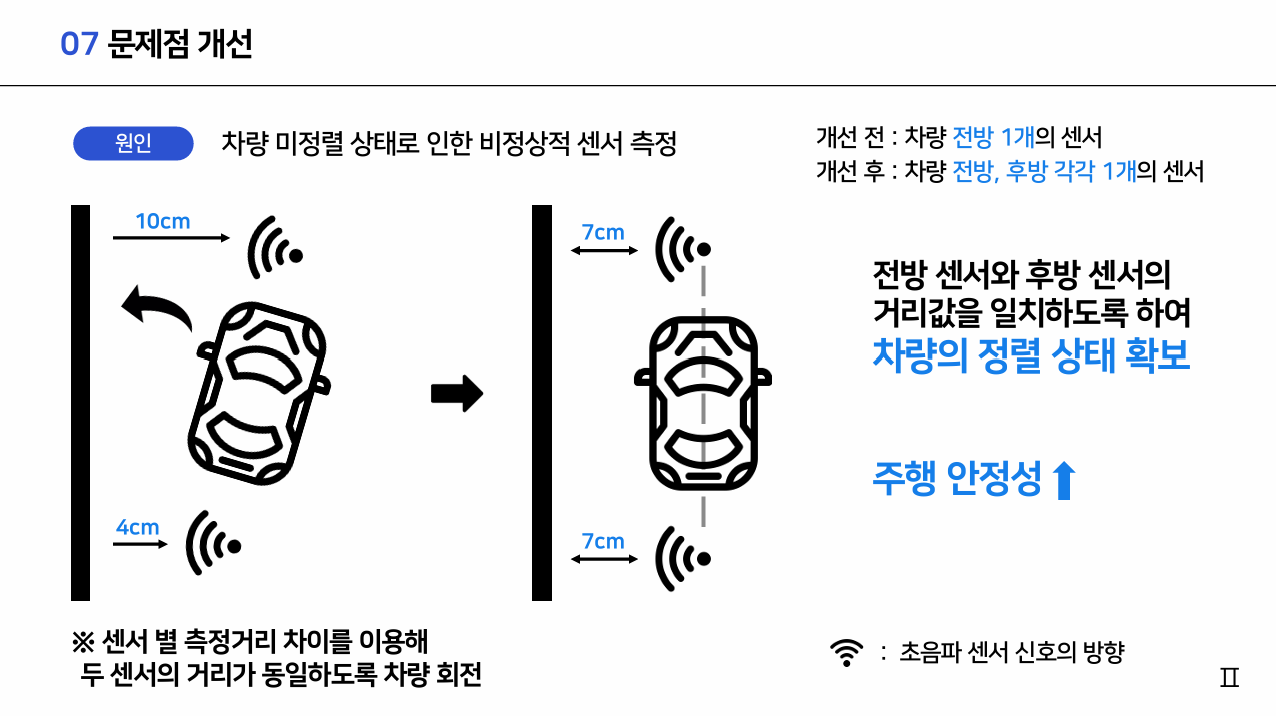
- [WHY] 원인 분석 (5Whys): 차량 회전 후 미정렬 상태에서 센서 측정값이 왜곡됨을 확인
- [ACT] 개선 사항 도출: * 기존: 전방 1개 센서로만 측정
- 개선: 전방 및 후방에 각각 센서 배치
- 결과: 두 센서의 거리값을 일치시켜 차량의 평행 정렬 상태를 확보하여 주행 안정성 증대

4. 프로젝트 목표 및 문제 해결 과정




4. 프로젝트 결과 및 성과
- 최종 결과: 전 기능(리모컨, 장애물 회피, 라인 트레이싱) 성공 판정
- 기록: 전체 코스 주행 시간 48초 달성
- 기술적 역량: 아두이노 기반 센서 제어 및 H/W-S/W 통합 역량 강화
- 소프트 스킬: 업무 세분화를 통한 협업 능력 향상 및 계획 수립/문제 해결 역량 강화

5. 발표 및 전달 역량 (Technical Presentation)
- 성과 발표 주도: 기업 관계자, 지자체 관계자 및 다수의 학생 앞에서 프로젝트 성과 발표 담당
- 시각화 기반 소통: 복잡한 알고리즘과 주행 데이터를 시각적 자료로 가공하여 기술적 타당성을 효과적으로 전달
- 논리적 설득: 5Whys 분석법과 PDCA 사이클 등 논리적인 근거를 바탕으로 프로젝트 개선 과정을 설명
6. 작업 회고 (Insight)
- 배운 점: 메모와 정리를 통한 체계적인 계획 수립의 중요성 체득
- 보완점: 한 문제에 과도한 시간을 할애하기보다 업무 우선순위 선정을 통한 효율적 시간 관리의 필요성 인식

'Project' 카테고리의 다른 글
| [2025 캡스톤 디자인] AI 기반 지능형 식재료 관리 솔루션 (3) | 2026.01.15 |
|---|